
系統(tǒng)介紹
隧道自動巡檢系統(tǒng)將先進的機器人技術(shù)和無損傳感的物聯(lián)網(wǎng)技術(shù)相結(jié)合,,長期、實時、空間上自由連續(xù)地獲得隧道內(nèi)部的設(shè)備運行狀態(tài)信息,,分析包括隧道結(jié)構(gòu)狀態(tài),、設(shè)備工作狀態(tài),、車輛行駛狀態(tài),、路面狀態(tài)、隧道氣象狀態(tài)在內(nèi)的各種狀態(tài)特征,,以便了解隧道運行中因損傷或者退化而造成的改變,,并利用診斷方法判斷損傷的發(fā)生、位置,、程度,,對隧道正常運行健康狀況做出評估,在危及隧道結(jié)構(gòu)安全性能的臨界點到來之前提早發(fā)現(xiàn)異常,,為隧道在特殊氣候,、交通條件下或隧道運行狀況嚴重異常時觸發(fā)預(yù)警信號,為隧道的維修,、養(yǎng)護與管理決策提供依據(jù)和指導(dǎo),。
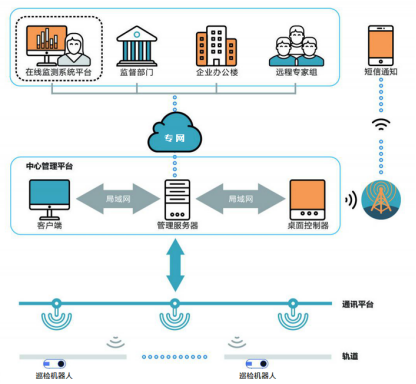 系統(tǒng)架構(gòu)圖
系統(tǒng)架構(gòu)圖
系統(tǒng)組成
隧道自動巡檢系統(tǒng)
由移動機器人子系統(tǒng),傳感子系統(tǒng),,監(jiān)控管理子系統(tǒng),,定位子系統(tǒng),緊急救援子系統(tǒng)組成,。
移動機器人子系統(tǒng)
主要包括行進模組、動力模組,、通訊模組,、定位模組、控制模組五大基礎(chǔ)子系統(tǒng),,這五大子系統(tǒng)是保證交通機器人運行的基礎(chǔ),,使其能延隧道自由運動,便于收集交通隧道內(nèi)部運行過程中產(chǎn)生的各種數(shù)據(jù),。
傳感子系統(tǒng)
包括圖像采集,,聲音傳感、溫濕度傳感,、危害氣體傳感,、紅外熱成像傳感、超聲波傳感等多種傳感方式,,是隧道感知的重要途徑,。
監(jiān)控管理子系統(tǒng)
主要負責對傳感子系統(tǒng)收集上來的數(shù)據(jù)進行分析處理及存儲,,為后續(xù)大數(shù)據(jù)分析提供基礎(chǔ)數(shù)據(jù),同時以合適的方式呈現(xiàn)給用戶,。
定位子系統(tǒng)
主要負責移動機器人本體的定位工作,,跟蹤本體的移動位置,確定重要的巡檢位置,,以便巡檢工作無偏差,。
緊急救援子系統(tǒng)
在監(jiān)測到煙霧及明火的時候,呼叫滅火機器人(另配),,并根據(jù)巡檢機器人提供的火災(zāi)位置信息,,第一時間趕赴火災(zāi)地點進行應(yīng)急消防工作。滅火機器人搭載有超細干粉滅火器,,滿足隧道的滅火要求,。
系統(tǒng)組成
視頻監(jiān)控功能
智慧隧道機器人可實現(xiàn)可見光與紅外視頻圖像采集功能,機器人可自動移動到指定位置,,控制云臺自由轉(zhuǎn)動,,拍攝隧道內(nèi)各種設(shè)備高清圖像和紅外熱成像,并將采集到的信息經(jīng)無線局域網(wǎng)實時傳輸?shù)街骺厥?,在主控室的工作人員便可根據(jù)圖像判斷出隧道內(nèi)的各種設(shè)備是否安全,。
巡航測溫功能
智能機器人搭載的紅外熱像儀,根據(jù)紅外熱成像原理,,能準確檢測設(shè)備運行時的表面溫度,。同時在后臺監(jiān)控界面上,準確顯示當前拍攝設(shè)備的運行溫度,,如果溫度值超出預(yù)先設(shè)定的閾值,,則會發(fā)出警報。采用巡航測溫的方式實現(xiàn)隧道測溫的全覆蓋,,機器人一邊沿著隧道行走,,一邊用紅外熱像儀對設(shè)備進行溫度檢測。不僅可以實現(xiàn)隧道測溫的全覆蓋,,而且能有效提高機器人在隧道內(nèi)巡檢的效率,。
環(huán)境監(jiān)測功能
巡檢機器人攜帶有氣體探測器與溫濕度傳感器,可以隨時對隧道內(nèi)的空氣環(huán)境與溫濕度進行分析并得出結(jié)果,,同時將結(jié)果反饋給主控室的工作人員,,也可人工設(shè)置報警的限值,包括低溫,、高溫報警限值,,濕度報警限值,氣體濃度報警限值,超過限值后立即聲光報警,,以防止由于工作人員對隧道環(huán)境的誤判,,造成生命危險。
雙向語音對講功能
當隧道內(nèi)設(shè)備發(fā)生現(xiàn)場工作人員不能解決的非常規(guī)問題時,,通過綜合隧道智能機器人的視頻設(shè)備和語音設(shè)備可實現(xiàn)現(xiàn)場工作人員與遠端專家的即時交互,,由專家來指導(dǎo)和監(jiān)督現(xiàn)場工作人員,實現(xiàn)正確規(guī)范的操作,,有助于問題的現(xiàn)場解決,。此時,機器人將伴隨現(xiàn)場的工作人員進行工作,。
自主巡檢功能
機器人可進行定時巡檢,、定點巡檢、定任務(wù)巡檢等多種巡檢方式,。常用的定點巡檢可以根據(jù)指定的路徑和指定的巡檢目標點進行自動勻速巡檢,,只需要設(shè)定巡檢路徑并啟動自動巡檢即可使機器人自動完成一次巡檢。機器人搭載高清攝像機,、高靈敏紅外熱成像儀,、拾音器、有害氣體傳感器,、煙霧傳感器,、溫濕度傳感器、光照傳感器等多種檢測設(shè)備,,自動對各種設(shè)備如電纜接頭,、接地箱、集水井,、隧道井體,、各種給排水管道等隧道內(nèi)設(shè)施以及輔助設(shè)備的外觀檢查、溫度診斷,、氣體檢測等工作,。
遙控巡檢功能
除機器人自動進行例行巡檢外,還可以通過人工遙控巡檢的方式對機器人進行實時遙控,。該項應(yīng)用模式適用于運維人員以及管理單位需要對某類設(shè)備的狀態(tài)進行鎖定與監(jiān)測,尤其對于在機器人自主巡檢過程中如檢測到設(shè)備,、環(huán)境狀態(tài)異常并向運維人員告警時,,運維人員可以在第一時間操控機器人快速到達異常設(shè)備位置,及時對異常設(shè)備進行查看并核實報警信息,,以便迅速制定響應(yīng)策略,。
應(yīng)急處理功能
機器人在日常巡視過程中,當檢測到隧道內(nèi)環(huán)境、設(shè)備,、安防情況等出現(xiàn)異?;虺霈F(xiàn)火災(zāi)、管道爆裂,、人員傷亡等事故時,,能迅速做出反應(yīng)并發(fā)出警報,鎖定設(shè)備故障和事故發(fā)生所在位置,,通知后臺運維人員及時采取措施,。
垂直爬坡功能
隧道在設(shè)計過程中,會遇到倒虹口設(shè)計,,該類設(shè)計導(dǎo)致機器人需要保證可以大角度爬坡能力,。本方案中,若遇到此情況,,會在爬坡處安裝金屬齒條結(jié)構(gòu),,機器人通過齒輪齒條結(jié)構(gòu)設(shè)計,可以平穩(wěn)安全的實現(xiàn)爬坡,。
火災(zāi)監(jiān)測與消防
智能機器人除了搭載有紅外熱像儀,,還搭載有煙霧檢測設(shè)備,可協(xié)同對隧道內(nèi)的火災(zāi)進行監(jiān)控預(yù)警,。當機器人發(fā)現(xiàn)火源后,,立即發(fā)出警報,提醒后臺人員采取應(yīng)急措施,,同時調(diào)動系統(tǒng)配套的消防機器人,。消防機器人根據(jù)巡檢機器人提供的火災(zāi)位置信息,第一時間趕赴火災(zāi)地點進行應(yīng)急消防工作,。滅火機器人搭載有超細干粉滅火器,,滿足電力隧道的滅火要求。
自身安全防護功能
智能機器人采用超聲波停障系統(tǒng),,對障礙物和隧道內(nèi)工作人員進行探測,,遇到障礙會停障并報警。同時在結(jié)構(gòu)上增加防護,,防止碰撞造成人員或者設(shè)備損傷,,與超聲波停障系統(tǒng)構(gòu)筑雙重安全保障,在超聲波停障系統(tǒng)失效情況下防止與障礙物的激烈碰撞,,并進行系統(tǒng)安全報警并在明顯位置安裝有閃動警示燈,,提醒隧道內(nèi)工作人員注意。
自主充電功能
掛軌式智慧隧道機器人本體自帶電池電量檢測電路,,且可人工設(shè)置電量報警下限,,一旦機器人檢測到電池電量低于設(shè)置值時則會自動停止當前巡檢任務(wù),同時發(fā)出警報,之后自主運行到充電點進行充電,。